|
Lotka-Volterra Equations: Its Workings - 2
|
|
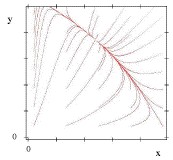
Solution to this problem does have stabel fixed point (X, Y) if R and S are sufficiently small as is shown in the phase diagram in the graph at the right. We now assume that species X controls R, and species Y controls S to their respective advantage. Since we have dX/dt=0, dy/dt = 0 , the function X[R,S] and Y[R,S] are determined from
0 = b - a X[R,S] - R Y[R,S] 0 = d - c Y[R,S] - S X[R,S] |
 |
 |
 |
Population of Competitors who are under a Common Predator
We now consider the case where both competitors have a common predator Z.
dx/dt = b x - a x2 - R x y - U x z
dy/dt = d y - c y2 - S x y - V y z
dz/dt = -h z +f U x z + f V y z
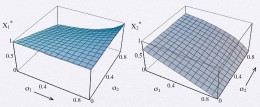
it is natural to assume that, at the fixed point (X、Y、Z) all species tweek with their own aggressive intensity ( X with R, Y with S and Z with V and U ). First optimize Z[V,U] with
dZ[U,V]/dU |U*,V* =dZ[U,V]/dV |U*,V* = 0
to obtain adiabatic expressions U*= U*(R,S) and V*= V*(R,S). Inserting these into the expression for x and Y gives us X[R,S] and Y[R,S] in the end. Right side of the graph above is an example of the plots X and Y as functions of both S and R. We observe that, in this case, X gains by decreasing R, and Y gains by decreasing S. The result is the pacification of both species X and Y who are stabiled at the stable fixed point as low aggression.