|
僫乕僎儖偲僔儏儗儞働儞儀儖僋偺昗弨柾宆係
|
|
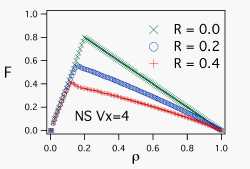
塃偵 U = 4 偺応崌偱丄R 傪 0.0丄0.2丄0.4 偲曄偊偰傒偨寢壥傪帵偡丅 |
 |
|
F 仺 U丒兿
|
(4.7)
|
偱梌偊傜傟傞乽帺桼岎捠乿偱偁傞偑丄兿偺戝偒偄椞堟偱偺怳晳偄偑堎側傞丅嬶懱揑偵偼兿偑侾偵嬤偯偔偵偮傟偰
|
F 仺 (1-R) (1-兿)
|
(4.8)
|
偲偄偆怳晳偄偵偩傫偩傫側偭偰偄偔丅偪側傒偵偙偺傛偆偵嬌尷偱偁傞怳晳偄偵嬤偯偔偙偲傪乽慟嬤揑偵堦抳偡傞乿偲屇傇丅
廰懾椞堟偱偺棳懇偼丄僌儔僼傪巈嵶偵尒傞偲丄幚嵺偼捈慄偱偼側偔忋偵撌側嬋慄偱丄枾搙傪壓偘偰峴偭偨帺桼岎捠偲偺嫬栚偺椞堟晅嬤偱偼丄棳懇偼(4.8)傛傝傕偐側傝彫偝偔側偭偰偄傞丅
偙偆偟偰傢偐傞帠偼丄侽偱側偄抣傪帩偮 R 偼丄偦偺抣偑彫偝偔偰傕丄椪奅枾搙傪堷偒壓偘丄廰懾偱偺棳懇傪妱偲戝偒偔尭傜偡丄偲尵偆帠偱偁傞丅
妋棪尭懍 R 偼摴楬偺忬嫷偵傕傛傞偑丄傑偨塣揮幰偺媄検傗乽拲堄怺偝乿偵傕傛傞偱偁傠偆丅崙偛偲抧曽偛偲偵塣揮偺廗姷偑堎側傞偙偲偼丄抦傜側偄搚抧偱塣揮偡傞偲偡偖婥偯偔偙偲偱偁傞丅偙偙偱摼偨岎捠婎杮恾偐傜帵嵈偝傟傞偺偼丄彫偝偄 R 偺抣偱昞偝傟傞拲堄怺偄塣揮廗姷傪傕偮搚抧偺曽偑丄戝偒偄 R 偱昞偝傟傞峳偭傐偄塣揮幰偺懡偄搚抧傛傝廰懾敪惗偺椪奅枾搙偑崅偔丄廰懾偑婲偙偭偰傕偦偺掱搙偑彫偝偄丅偟偐偟廰懾偑婲偙傞傑偱偼偳偪傜偱傕偁傑傝曄傢傜側偄丅峫偊偰傒傟偽偙傟偼摉慠偺帠偱偁傞偑丄幵偺懡偄戝搒巗偺曽偑塣揮儅僫乕偑堦斒偵傛偔側傞偲偄偆宱尡揑帠幚偲傕崌抳偡傞丅