
- トップページ
- NEWS & TOPICS
- 自動運転の完成度を競う 相磯秀夫杯 FPGAデザインコンテストで優勝
10月23日、24日、岡山大学津島キャンパスにて開催された「第10回 相磯秀夫杯 FPGA(Field Programmable Gate Array:設計者が構成を設定できる集積回路)デザインコンテスト」で、システム工学群 集積システム研究室(密山 幸男教授)の学生で構成されたTeam KUTが、2つのレギュレーションで優勝しました。
設計した論理回路を自由に書き込めるフィールドプログラマブル技術は、高性能コンピューティングシステム、低電力制御機器、モバイル通信機器など、幅広い分野で用いられています。最近では機械学習アプリケーションの組込み実装にも用いられており、未来のIoT社会を実現するキーテクノロジーとして注目されています。
(左から密山教授、泉 雄貴さん、山本 凌平さん(ともにシステム工学群 4年)、田中 知成さん(大学院修士課程 電子・光工学コース 2年) ※撮影時のみマスクを外しています)
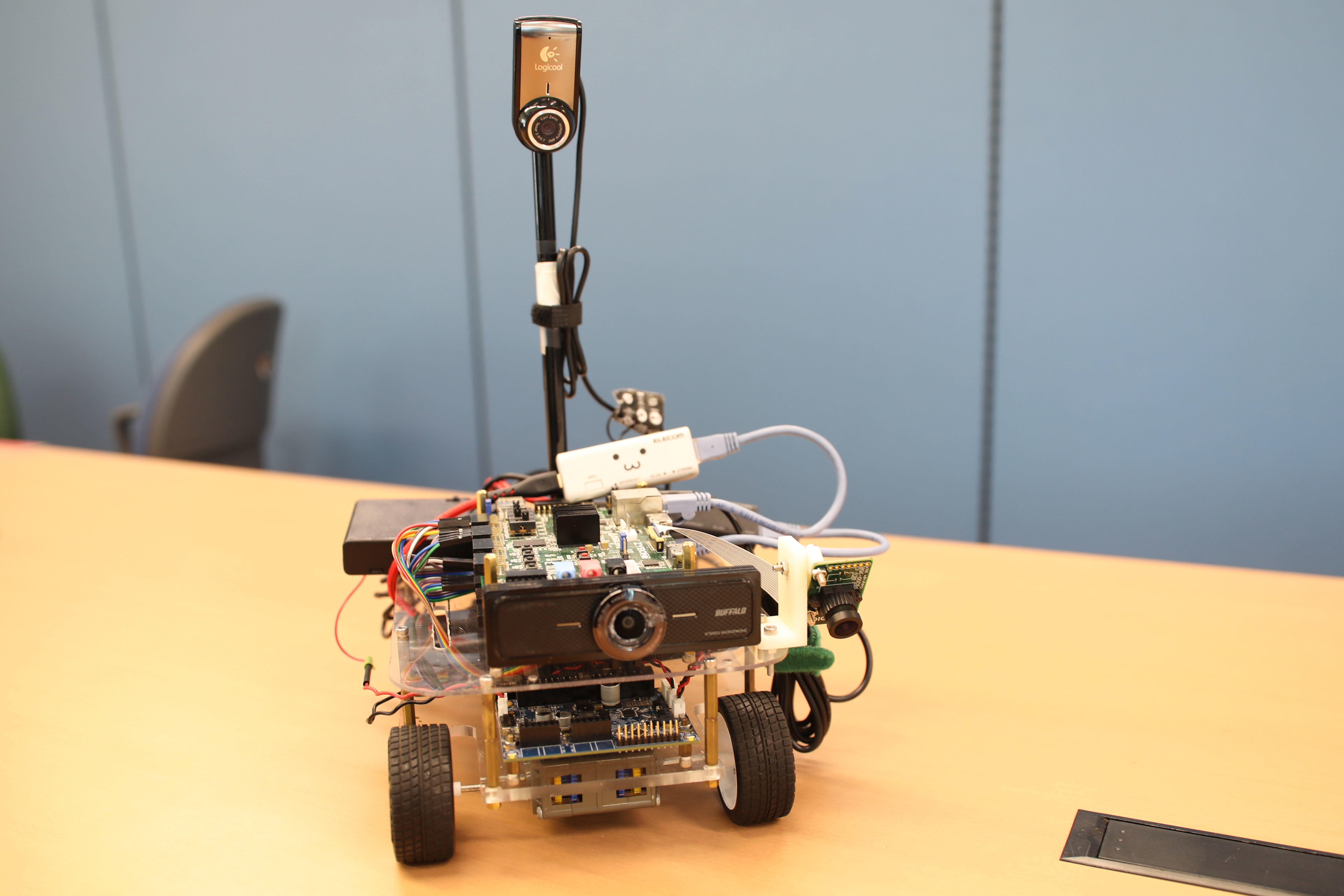
今回の設計コンテストの課題は「将来のレベル5自動運転(自律的な完全自動運転)に求められるFPGA技術」で、自律走行ロボットを開発し自動運転の完成度を競うものです。会場に設けられたミニチュアの道路上で、横断歩道や交差点、信号、障害物、歩行者などを認識しながら所定のルートを走行する精度が競われました。
本大会の1つ目のレギュレーションは、2019年に中国天津市で開催された国際大会ルールに準拠したもので、2つ目のレギュレーションは、12月開催予定の国際大会ルールに準拠したもので、会場内で機体に直接手を触れての調整作業が一切禁止され、すべてインターネット経由のリモート操作で行う必要があるという厳しい制約が課せられたものです。
本学チームは複数のカメラとFPGAボードを使用し、ハードウェア処理とソフトウェア処理の協調動作を工夫することで安定した走行を実現しています。FPGAを用いた自律走行ロボットの開発は、画像認識処理のFPGA実装のみならず、車体設計から電子工作まで、情報・機械・電子に関する知識と技術が求められるため、コンテスト課題としては極めて難易度が高いものですが、これまで蓄積した技術と経験であらゆる課題を乗り越えてきました。

チーム代表の山本さんは「この結果は、密山教授をはじめ、今まで先行研究してきた先輩方、研究室のメンバーのおかげです。感謝申し上げます。本年12月に開催される国際大会に向けて、信号機検出の安定性向上等、課題は多々あるので、自分の頑張りどころととらえ、全力で研究開発に取り組んでいきます」と語りました。
RELATED POST
関連記事