
- トップページ
- NEWS & TOPICS
- 森本 拓馬さんが日本機械学会中国四国支部で「若手優秀講演フェロー賞」を受賞
3月3日、日本機械学会中国四国支部 第62期総会・講演会が鳥取大学 鳥取キャンパスで開催され、森本 拓馬さん(大学院修士課程 航空宇宙工学コース 2年/大阪府立刀根山高等学校出身/指導教員:岡 宏一教授))が、若手優秀講演フェロー賞を受賞しました。
同賞は、若手の専門家育成を支援し、もって科学技術創造立国のための人材育成に貢献することを目的とし、日本機械学会の支部・部門等が主催する講演会で、優れた発表を行った26歳未満の会員に授与されます。同講演会では、中四国管内の大学等から137件の発表の中から6件が選ばれました。

森本さんの発表テーマは、「斜面着陸機構を有する4発ティルトウィング機の開発」です。
4発ティルトウィング機(Quad rotor Tilt Wing : QTW)は垂直離着陸機の一種です。滑走路を必要としない垂直離着陸や、定点でのホバリングが可能な回転翼機の特徴と、高速・長時間の飛行が可能な固定翼機の特徴を併せ持った航空機の形態であり、滑走路が利用できない災害現場や不整地などでの運用が期待されています。前後の主翼の機軸に対しての角度を変える(=ティルトする)ことが特徴で、離陸時には主翼を地面に対して90°にすることで回転翼機のように垂直離陸し、徐々に主翼を水平に近づけていく遷移飛行を経て固定翼機のように水平飛行します。このように、回転翼機と固定翼機の飛行特性を使い分けることができるのが、4発ティルトウィング機の最大の利点です。
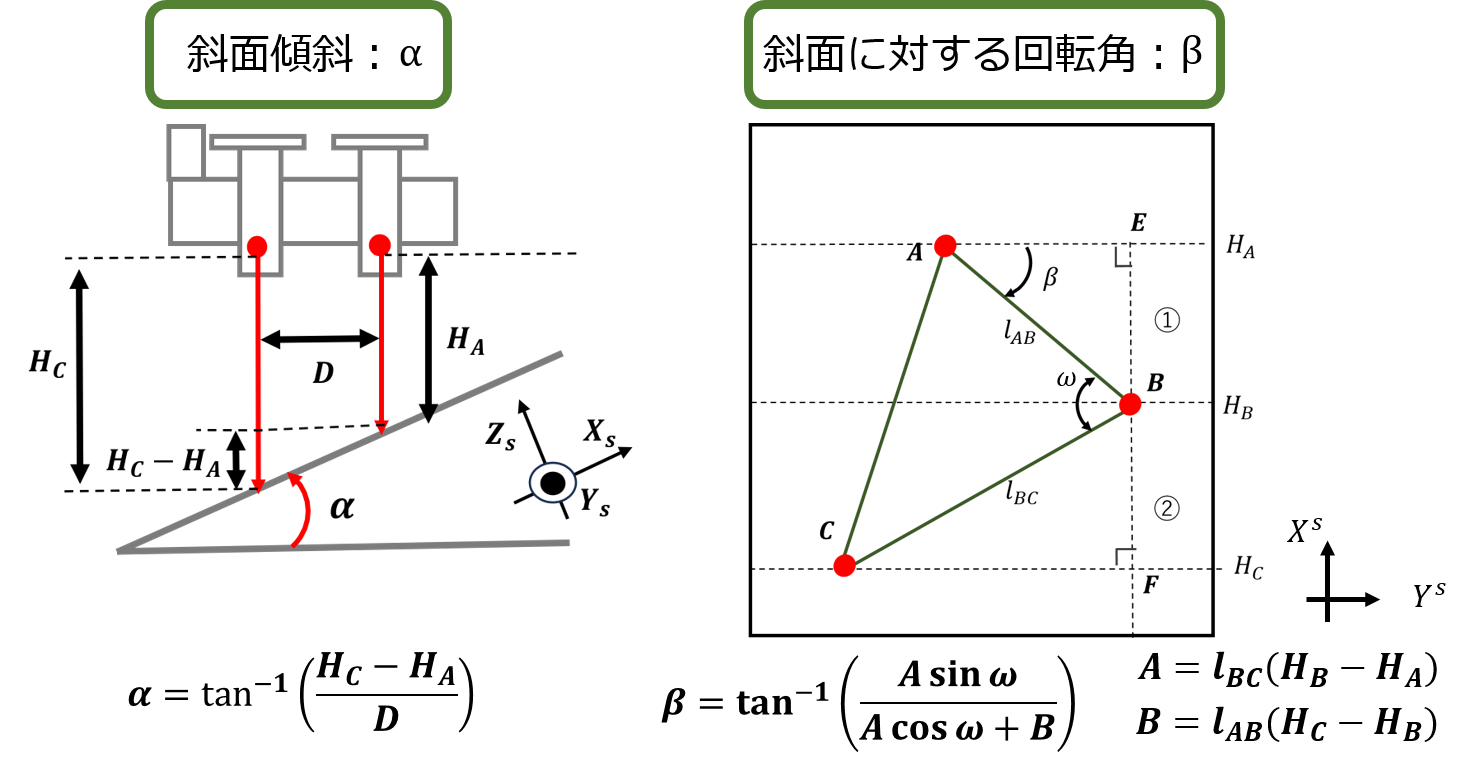
(森本さんが開発した、斜面推定システムの推定原理)
本研究では、4発ティルトウィング実機による斜面への自動着陸の実証を目的として、斜面の傾斜推定と斜面に対する機体の自己位置推定を行うアルゴリズムの提案と、着陸検証に必要な機体の離陸、およびホバリング制御システムの開発に取り組みました。その結果、深度情報を用いた斜面推定システムを提案、深度カメラを実装した精度検証を行い、斜面推定と回転角推定の両方を高精度で推定することに成功しました。一方、制御システムの開発では、インナーループのゲイン不足により、機体姿勢を安定化させて、離陸・ホバリングすることはできませんでした。今後、飛行中の振動によるノイズの補修方法と制御器の設計の開発が進展すれば、自動斜面着陸の実現につながります。
受賞を受け、森本さんは「このような栄えある賞を受賞でき光栄です。自分のやりたいことを尊重し、丁寧にご指導くださった岡先生には感謝申し上げます。飛行機に興味を持ったきっかけは、高校時代に観た映画「バック・トゥ・ザ・フューチャー」でした。興味ある研究は楽しく、時間を忘れて没頭しました。計算式をひらめき、実際に使えると分かった時には研究室の仲間と『やった!』と歓声をあげました。来春からは、製造業でロケットか飛行機の開発に携わる予定です。いつか凄腕エンジニアと言われるように、常に勉強を続けます。最後になりましたが、高知で出会えた仲間は私の宝物です。いつも支えてくれてありがとうございました」と感謝と抱負を語りました。
RELATED POST
関連記事