
- トップページ
- NEWS & TOPICS
- 丹羽 拓巳さんが日本機械学会中国四国支部で「若手優秀講演フェロー賞」を受賞
3月3日、日本機械学会中国四国支部 第61期総会・講演会がオンラインで開催され、丹羽 拓巳さん(大学院修士課程 航空宇宙工学コース 2年/愛知県立江南高等学校出身)が、若手優秀講演フェロー賞を受賞しました。
同賞は、若手の専門家育成を支援し、もって科学技術創造立国のための人材育成に貢献することを目的とし、日本機械学会の支部・部門等が主催する講演会で、優れた発表を行った26歳未満の会員に授与されます。
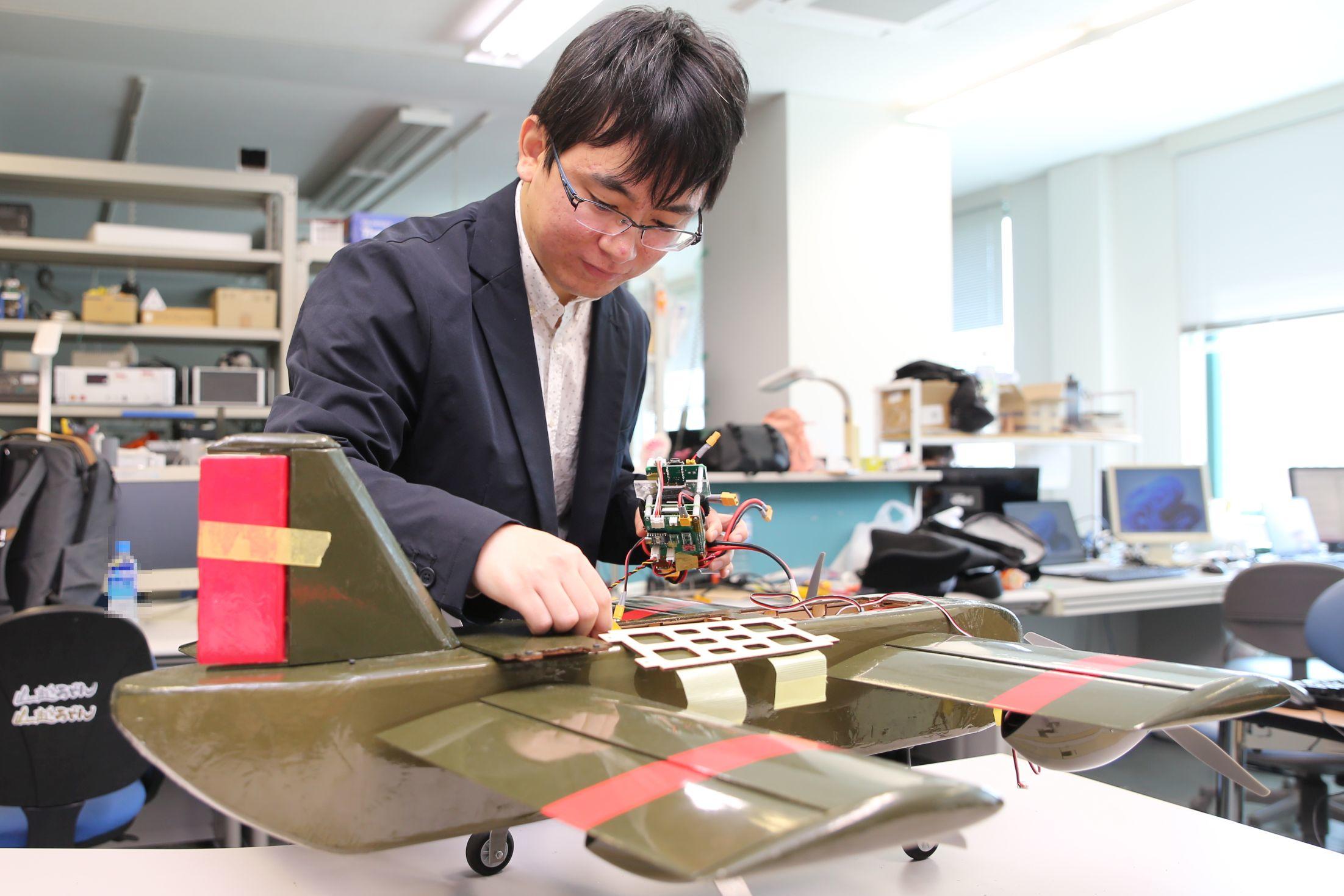
丹羽さんは、機械・航空システム制御研究室(指導教員:岡 宏一教授)に所属し、無人航空機に関する研究に取り組んできました。
今回の講演会では、「4発ティルトウィング機の傾斜地に対する着陸の検討」をテーマに発表しました。
4発ティルトウィング機(Quad rotor Tilt Wing : QTW)は垂直離着陸機の一種です。滑走路を必要としない垂直離着陸や、定点でのホバリングが可能な回転翼機の特徴と、高速・長時間の飛行が可能な固定翼機の特徴を併せ持った航空機の形態であり、滑走路が利用できない災害現場や不整地などでの運用が期待されています。前後の主翼の機軸に対しての角度を変える(=ティルトする)ことが特徴で、離陸時には主翼を地面に対して90°にすることで回転翼機のように垂直離陸し、徐々に主翼を水平に近づけていく遷移飛行を経て固定翼機のように水平飛行します。着陸時には逆のプロセスを経てホバリングしながら垂直に着陸します。垂直離着陸機は回転翼機と固定翼機の特徴を兼ね備える一方、低速(ホバリング)域に限れば回転翼機に、高速域に限れば固定翼機に性能が劣ることから、開発コストが高くなるという課題があります。
そこで丹羽さんは、4発ティルトウィング機の低速域における回転翼機への優位点となる傾斜地着陸(ホバリングを保った姿勢角変化)の実証を行いました。具体的には、機体の基礎システム開発、機体の数理モデル化、シミュレーションを行い、目標の動作が可能であることを確認しました。また、実機飛行に近い条件の下でのシミュレーション結果から、実機飛行の際に生じる課題の検討を行いました。一方で、実機飛行による傾斜地着陸については有用なデータが得られず、実現のためにはプログラムのデバッグ、システム同定の再検討、制御則の変更などが必要であることが分かりました。
受賞を受け、丹羽さんは「このような栄えある賞を受賞でき光栄です。最終的な研究目標が達成できていなかったので受賞の話をいただいた時は驚きましたが、研究過程について評価していただきうれしかったです。研究活動を支えてくださった指導教員の岡先生をはじめ、研究室の仲間に心から感謝申し上げます。私は、航空宇宙に関する研究に興味があり、工科大に入学しました。工科大に来ていなかったら今の自分はないと思うくらい、勉強する意欲や、物をつくりあげるためのモチベーションを維持できる環境が整っていました。最後の飛行実験がうまくいかなかったのが一番しんどかったのですが、何が駄目だったのかを洗い出した時間はとても密度の濃いものでした。課外活動では、ロケットや模擬人工衛星の開発・実験をしているRaskに所属していました。そこで"ものづくり"をした経験も研究に活かせたと思っています。春からは、自動車メーカーで技術職に就きます。社会人になっても、興味・関心が沸いたことには取り組んでいきたいと思います。そして、ソフトウェアとハードウェアの両方の専門家となり、メカとソフトの橋渡しができる技術者になれるように頑張ります」と喜びと抱負を語りました。
RELATED POST
関連記事